
About
Projects
Experiences
Links
This end-of-study internship, conducted at the I2M laboratory (Institute of Mechanics and Engineering) in Bordeaux, was part of the SDC2 (Smart Disassembly Cell for Circularity) project. The primary goal was to explore how Industry 4.0 technologies can be integrated into the circular economy to improve the recovery of functional electronic components. My work focused on the "Product Identification Recognition" and "Disassembly Cell" components of the project, aiming to develop a robotic and computer vision solution to identify, recognize, and ultimately extract valuable components from PCBs (Printed Circuit Boards).
The first major task was to build a reliable model for recognizing electronic components on PCBs. After evaluating several versions of the YOLO (You Only Look Once) model, YOLOv8s was selected for its optimal balance of lightness and precision, making it ideal for real-time applications with a camera embedded on a robot. Since no suitable public image datasets were available for our specific environment, I created a custom image bank from PCBs in the workshop.
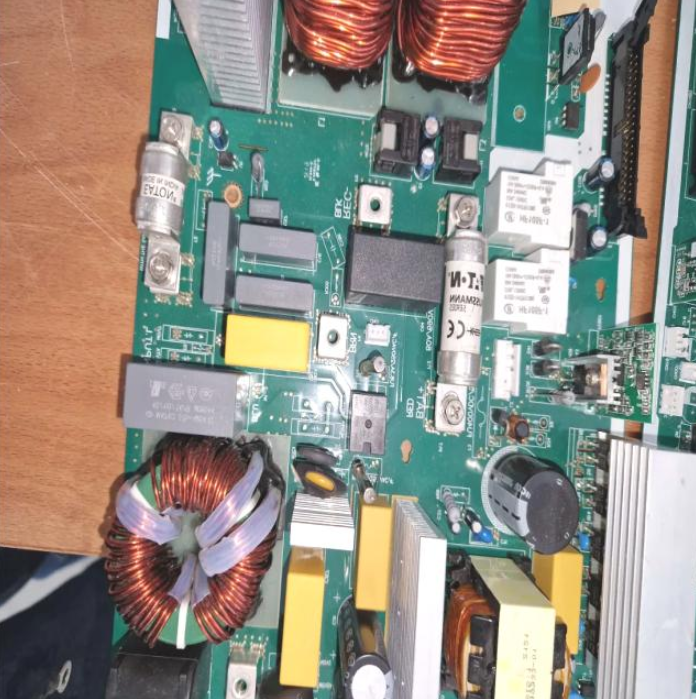
Example 1 of dataset creation

Example 2 of dataset creation
The model was trained using a "Few-Shot Object Detection" (FSOD) methodology, which aims to achieve high accuracy with a minimal number of images. After several rounds of training and refinement—adjusting parameters like the learning rate and freezing layers to retain learned features—the final model achieved a precision of approximately 91% (mAP@0.5) for the detection of 8 different component types, including capacitors and cables.
Recognition model running with cables
Recognition model running on microelectronic components
To address the critical lack of information about components, a second model was developed to read the references (e.g., C22, R5) printed on the PCBs using Optical Character Recognition (OCR). This would allow us to link a component to a database and retrieve its specifications. I experimented with both local models like EasyOCR and Tesseract, and more powerful cloud-based models from Microsoft Azure and Google Gemini. The primary challenge was the poor image quality and low resolution from the laser scanner used, which made character distinction difficult. While the cloud models performed better, recognizing 7-10 references per image compared to 3-4 for local models, the results were still not optimal. This led to the conclusion that a higher-resolution camera or a different scanning method is necessary to improve accuracy.
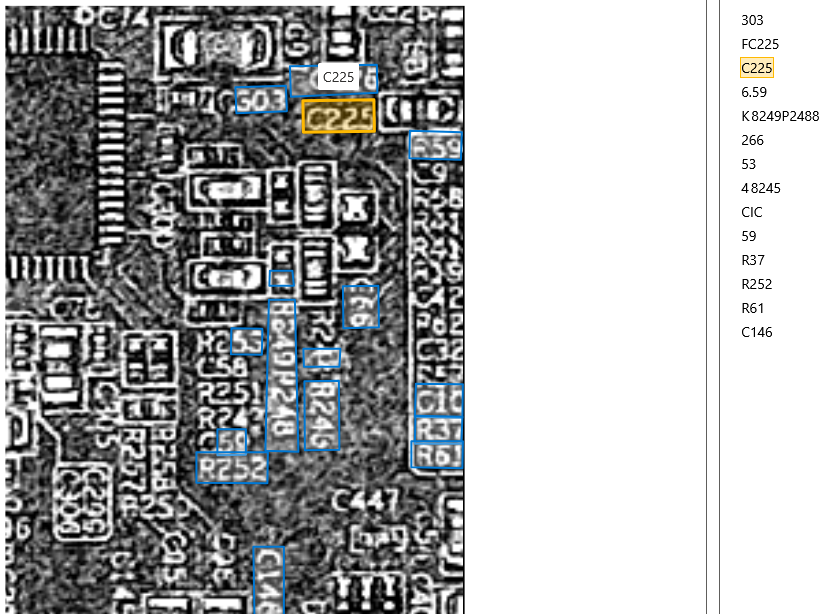
References recognized with OCR by AzureOCR model
A key objective was to implement this recognition system on a robotic arm to perform physical disassembly. The chosen hardware was a Doosan M1013 collaborative robot. Before real-world implementation, it is crucial to work in a simulated environment. Using ROS2 (Robot Operating System 2) and Gazebo, I began building a simulation of the robotic cell. I successfully imported the Doosan robot's model, configured all its joints correctly and initiated the environment. This simulation provides a robust foundation for developing and testing the robot's movements and its interaction with the vision system before transitioning to the physical hardware.
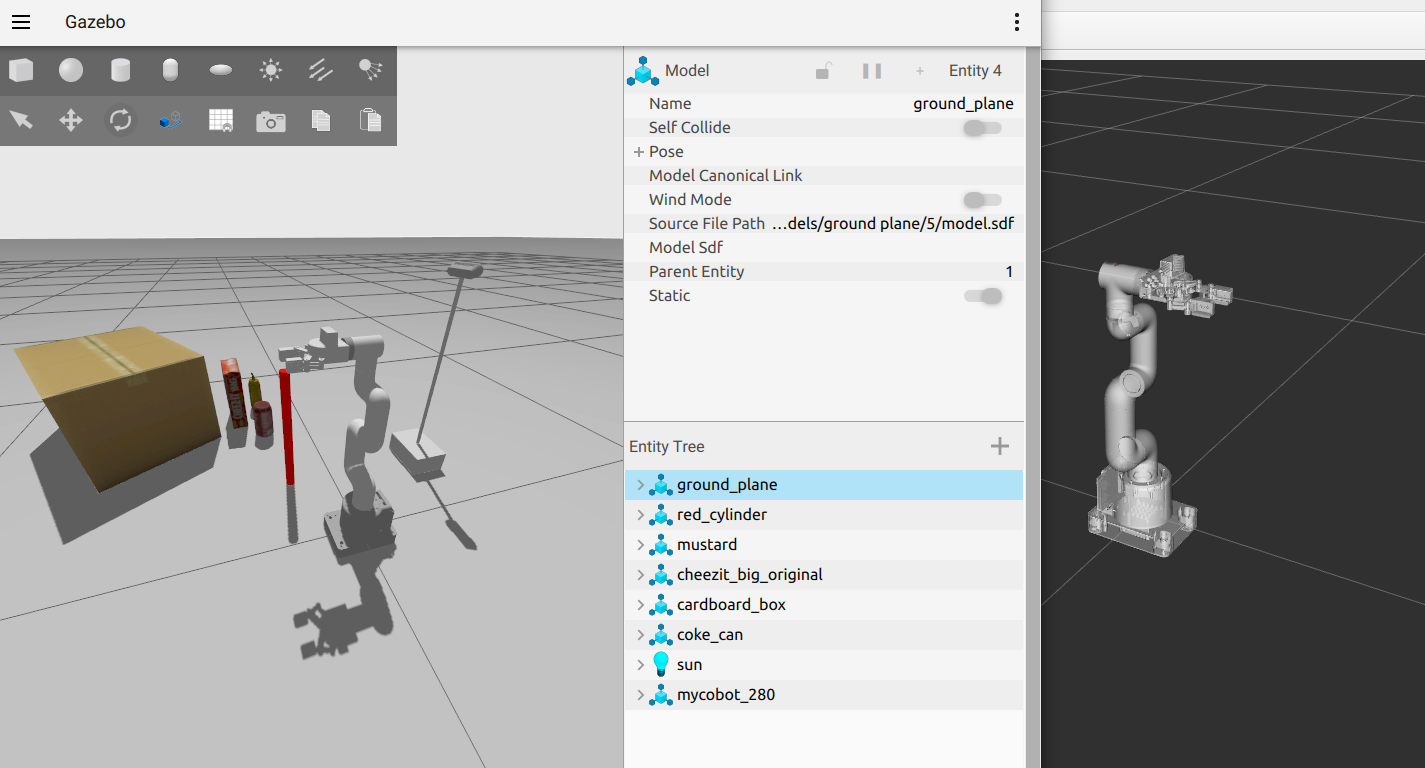
Robotic arm simulation in Gazebo
A significant portion of the internship was dedicated to the research and development (R&D) required to design a complete and efficient disassembly cell. This involved creating a detailed action plan, mapping out the entire process from product arrival to component extraction, and investigating various "technological bricks" that could be integrated to enhance the system's capabilities.
The research focused on identifying promising technologies that could work in synergy with the core computer vision system:
Other technologies such as LiDAR, ultrasound, and thermal imaging were also analyzed. The ultimate goal of this R&D work is to propose a robust and synergistic architecture for the disassembly cell, combining the most effective technologies to create a highly efficient recycling and component recovery process.
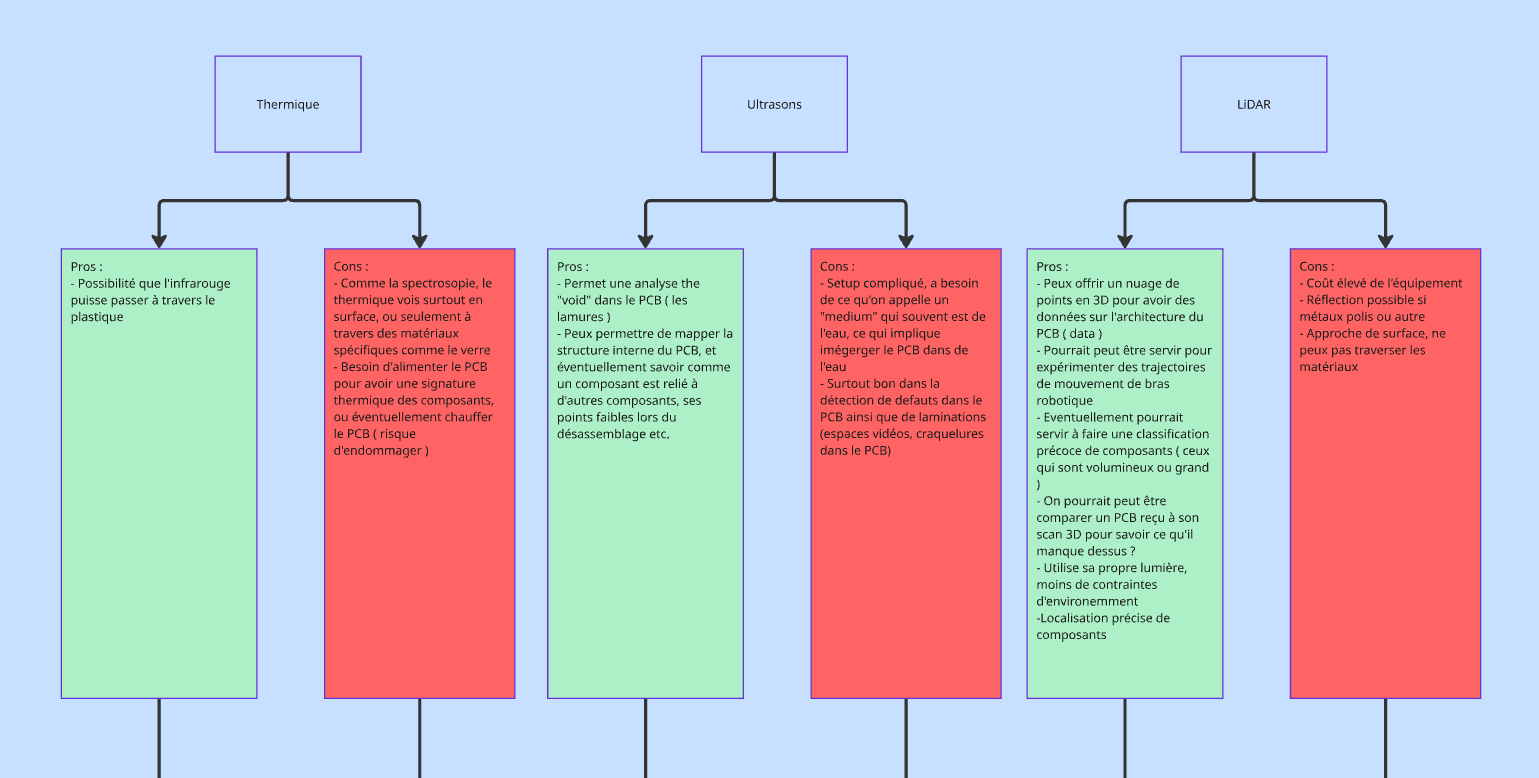
Other technologies explored
Through this internship, I was able to successfully address several key challenges in the project. The development of the component and reference recognition models provides a solid foundation for tackling the lack of information on electronic components, while the robotic simulation is a critical first step toward automated disassembly. This experience was incredibly enriching, allowing me to apply and strengthen my skills in AI, neural networks, and robotics simulation with ROS and Gazebo. Working in a research and development environment taught me the importance of autonomy and rigor, and having the freedom to organize my work and design the system's architecture has greatly developed my skills in these areas.